Engineers in Switzerland have built a robotic hand that does something human hands simply cannot: detach, crawl across a surface on its fingers, and grasp objects from multiple angles at once.
The device, described in Nature Communications this week, resembles Thing from the Addams Family in more than just appearance. Like the fictional sentient hand, it operates independently, scurrying across floors or into tight spaces where a traditional robotic arm cannot reach. The hand can bend its fingers backwards, hold a mustard bottle on one side while simultaneously picking up a can of chips on the other, and carry objects weighing up to 4.5 pounds.
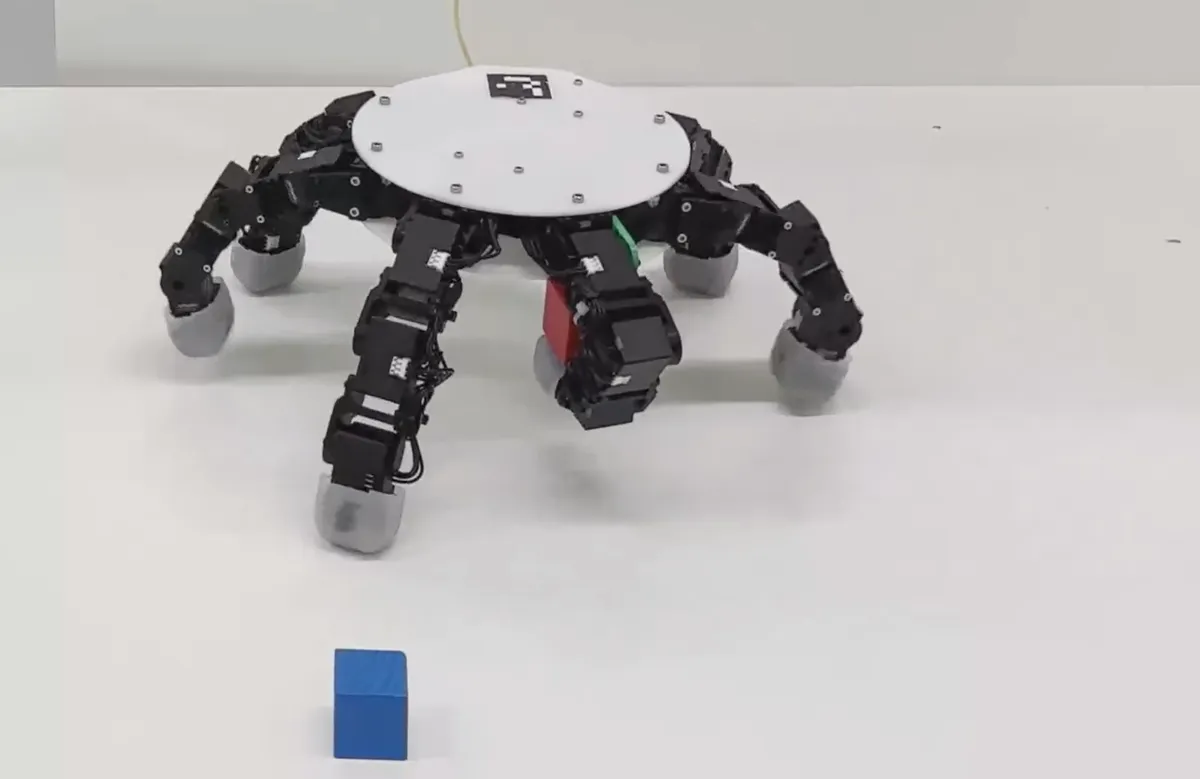
A six-fingered version of the robotic hand [X. Gao et al., Nature Communications, 2026]
We're a new kind of news feed.
Regular news is designed to drain you. We're a non-profit built to restore you. Every story we publish is scored for impact, progress, and hope.
Start Your News DetoxAude Billard, a roboticist at the Swiss Federal Institute of Technology in Lausanne and co-author of the study, spent years pursuing this idea. "It's been a dream of mine for many, many years to design a new hand which departs from anthropomorphic hands," she explains. The breakthrough came from rethinking what a hand actually needs to do. Human hands are marvels of evolution, but they're also constrained by a single arm, a palm that grasps only one way, and fingers that work best in one configuration.
Billard's team used machine learning to test thousands of theoretical designs before building a physical prototype. The final version uses silicone, electric motors, and 3D-printed structures. They found that four or five fingers worked best—more than that added weight without improving performance, while fewer fingers sacrificed stability.
Where this goes next
The practical applications are already clear to researchers. A robotic hand like this could crawl into a water pipe or the engine room of a submarine to retrieve dropped objects. It could navigate spaces too narrow or too hazardous for a human worker. With further development, Billard suggests it could even function as a prosthetic, giving people new ways to interact with their environment.
Other roboticists recognize the significance. Matei Ciocarlie at Columbia University calls it "a beautiful example of what you can achieve if you approach robotic design without being weighed down by all the constraints of the human factor." Not everyone is entirely convinced—Nancy Pollard at Carnegie Mellon notes that fingers that bend in multiple directions may not apply pressure as effectively as human digits, and there's still limited evidence of the hand manipulating objects it's already holding.
But for Billard, the point isn't to replicate the human hand. It's to imagine what becomes possible when you stop trying. "I believe this is what science is about," she says.