
A tomato doesn't care whether the hand reaching for it is human or robotic. But the tomato plant does. Clustered on tangled stems, surrounded by leaves, with unripe fruit mixed among the ready ones, tomatoes have resisted automation in ways that most other crops haven't. Now researchers in Osaka have cracked something fundamental: teaching robots to assess difficulty before they act.
The problem sounds simple until you try to solve it. Agricultural labor shortages are pushing farms toward automation, but selective harvesting—picking only the ripe fruit while leaving the rest intact—requires judgment that robots have historically lacked. A machine vision system can spot a red tomato. But can it know whether that particular red tomato will actually come free without damaging the vine, or whether approaching from a different angle would work better?
Assistant Professor Takuya Fujinaga at Osaka Metropolitan University's Graduate School of Engineering flipped the question. Instead of asking "can a robot pick this tomato," he built a system that asks "how likely is a successful pick?" The difference matters.
We're a new kind of news feed.
Regular news is designed to drain you. We're a non-profit built to restore you. Every story we publish is scored for impact, progress, and hope.
Start Your News DetoxHis approach combines image recognition with statistical analysis. The robot examines not just the fruit itself, but the angle of its stem, the position of surrounding leaves, whether the tomato is partially hidden, and the geometry of the cluster. From these visual cues, it calculates the probability of success from different picking directions. Then it chooses the approach most likely to work.
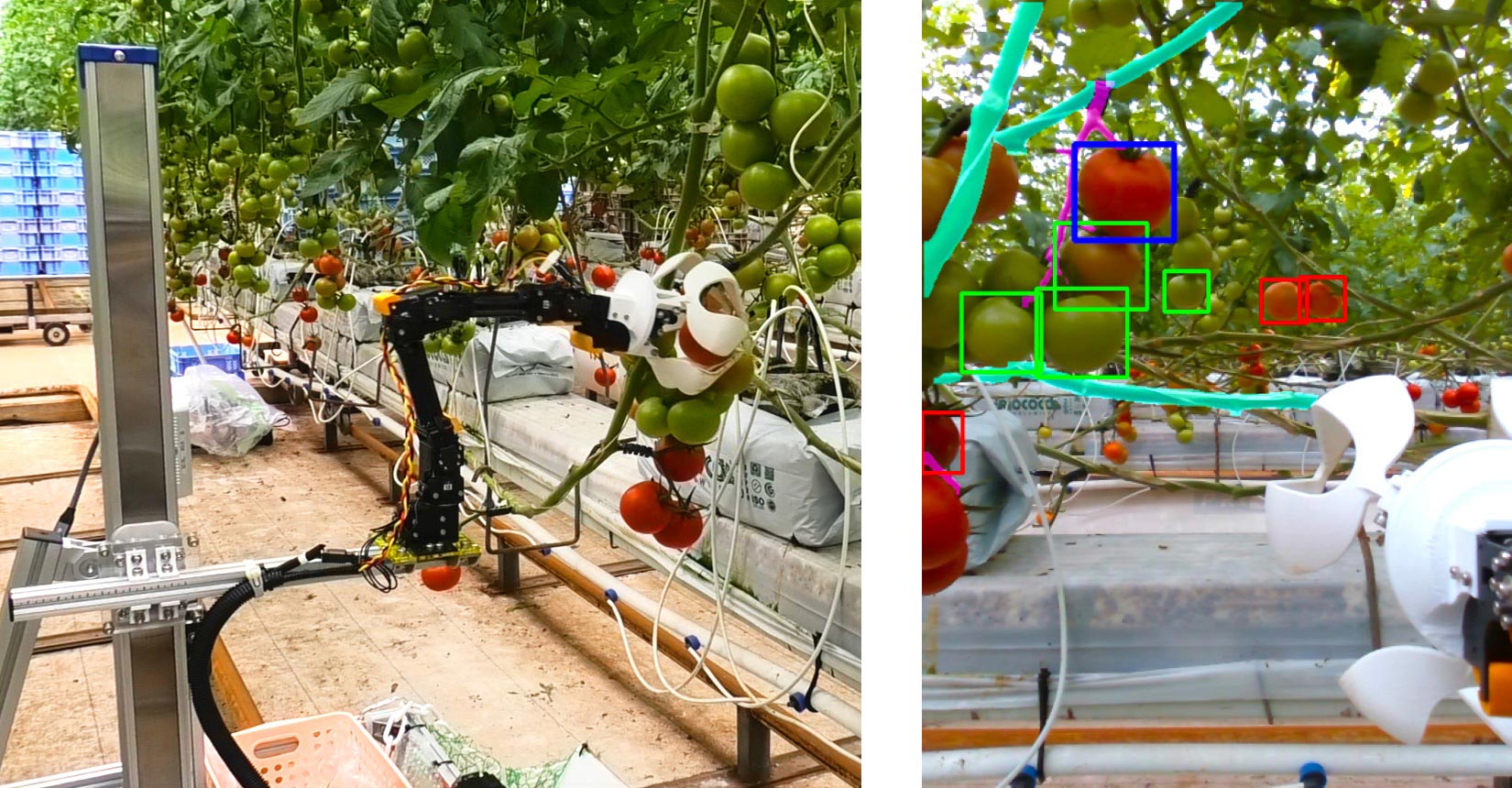
The left image shows the tomato-picking robot and camera. The right image shows a 'robot-eye view' of the tomatoes. Red represents mature fruits, green indicates immature fruits, and blue indicates selected harvesting targets. Credit: Osaka Metropolitan University
In field trials, the system achieved an 81% success rate—substantially higher than previous robotic harvesting attempts. More telling: about a quarter of successful picks came on a second or third approach, after the robot had tried the front of the plant and failed. It didn't just keep trying blindly. It adapted.
This is the kind of incremental progress that doesn't make headlines but reshapes what's possible. Fujinaga sees a near future where robots handle the straightforward picks—the low-hanging tomatoes, so to speak—while humans focus on the difficult cases that require dexterity or judgment. Not replacement. Collaboration.
The research establishes what Fujinaga calls "ease of harvesting" as a measurable metric, moving robotic agriculture from "can it work" to "when will it work." For farms facing labor constraints, that shift from detection to prediction could be the difference between viability and closure.








