Imagine a future where robots are everywhere, diligently doing our bidding. Now imagine them all stuck in a massive, unmoving metal pile-up, perpetually late for their next delivery. Not exactly the efficient future we were promised, is it?
Turns out, Harvard scientists have been pondering this very nightmare scenario and found a surprisingly simple, almost absurd, solution to robot traffic jams: tell them to wiggle a bit. Yes, a touch of controlled chaos might be the secret sauce to keeping our automated workforce flowing.
The Goldilocks Wiggle
For years, the thinking went: more robots, more work done. Until, of course, there are too many robots, and they all just get in each other's way, grinding to a halt. It's the robot equivalent of a shopping mall parking lot on Black Friday. Harvard researchers, led by L. Mahadevan, decided to tackle this head-on, wondering what the optimal robot-to-space ratio really was.
We're a new kind of news feed.
Regular news is designed to drain you. We're a non-profit built to restore you. Every story we publish is scored for impact, progress, and hope.
Start Your News DetoxTheir work, published in Proceedings of the National Academy of Sciences, reveals that when things get crowded, a little bit of "noise"—or randomness—in a robot's path actually helps. It's like telling them to not quite walk in a straight line, which sounds like a recipe for disaster but somehow isn't.
Lucy Liu, a Ph.D. student who spearheaded the study, explains the counterintuitive logic: when you introduce enough randomness, you can start using averages. Average distances, average times, average behaviors. Suddenly, a seemingly chaotic system becomes predictable. Which, if you think about it, is both impressive and slightly terrifying.
From Simulation to Swarm
The team first ran computer simulations. Picture hundreds of tiny digital agents, each given random starting points and random goals. Once a goal was met, boom, new goal. They then varied how much these agents wiggled. No wiggle meant straight lines. Lots of wiggle meant wild zigzags. The sweet spot, the "Goldilocks" level of noise, was somewhere in the middle. Enough wiggle to slip past each other, but not so much that they just wandered off for a coffee break.
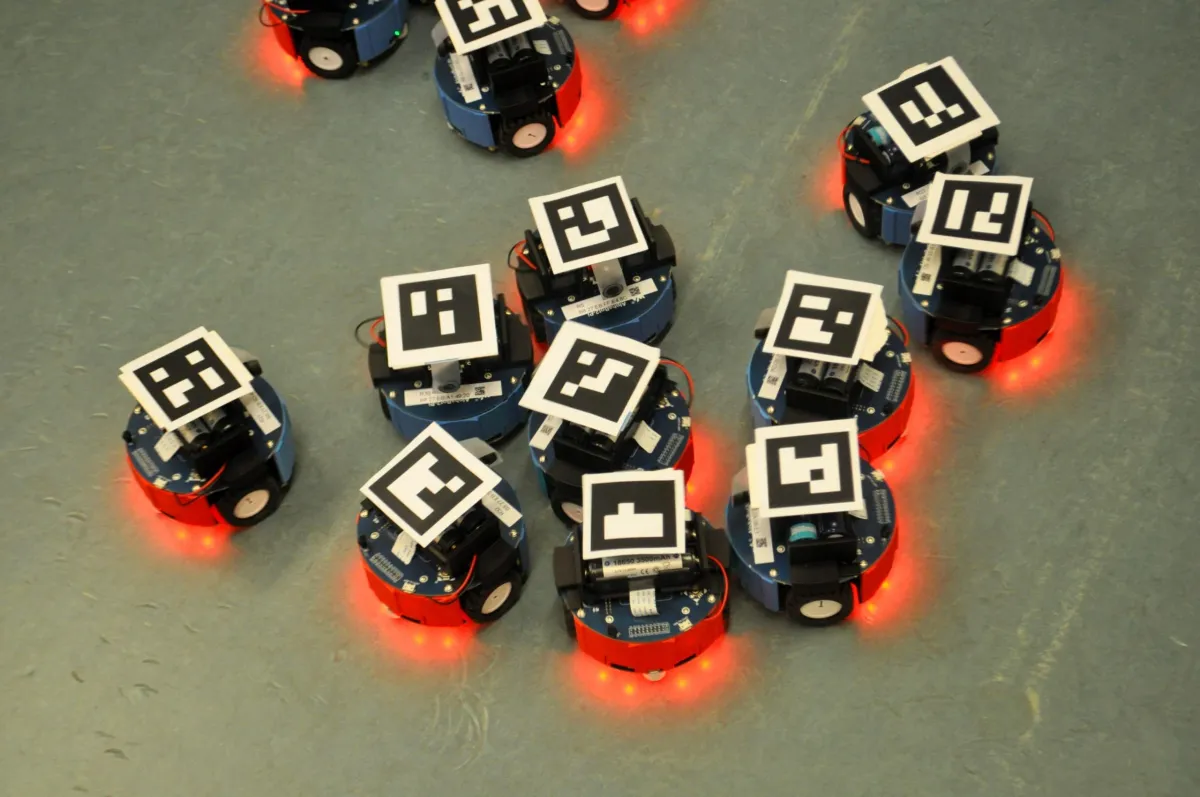
Then came the real-world test. Liu teamed up with physicist Federico Toschi in the Netherlands, unleashing swarms of actual wheeled robots in a lab. They weren't quite as precise as their digital counterparts, but the pattern held: a moderate amount of randomness prevented gridlock and kept the little guys moving. It seems a polite, slight swerve is far more effective than an unyielding straight line when navigating a crowd.
This whole endeavor highlights a fascinating principle: complex, coordinated behavior doesn't always need a super-smart central controller. Sometimes, simple, local rules—like "don't walk too straight"—are enough to achieve remarkable efficiency. Mahadevan suggests these findings could apply to everything from ant swarms to animal herds, and yes, even human crowds.
So, the next time you're stuck in traffic, maybe just try a little random wiggle. Or, you know, just wait for the robots to figure it all out for us. They're getting there.