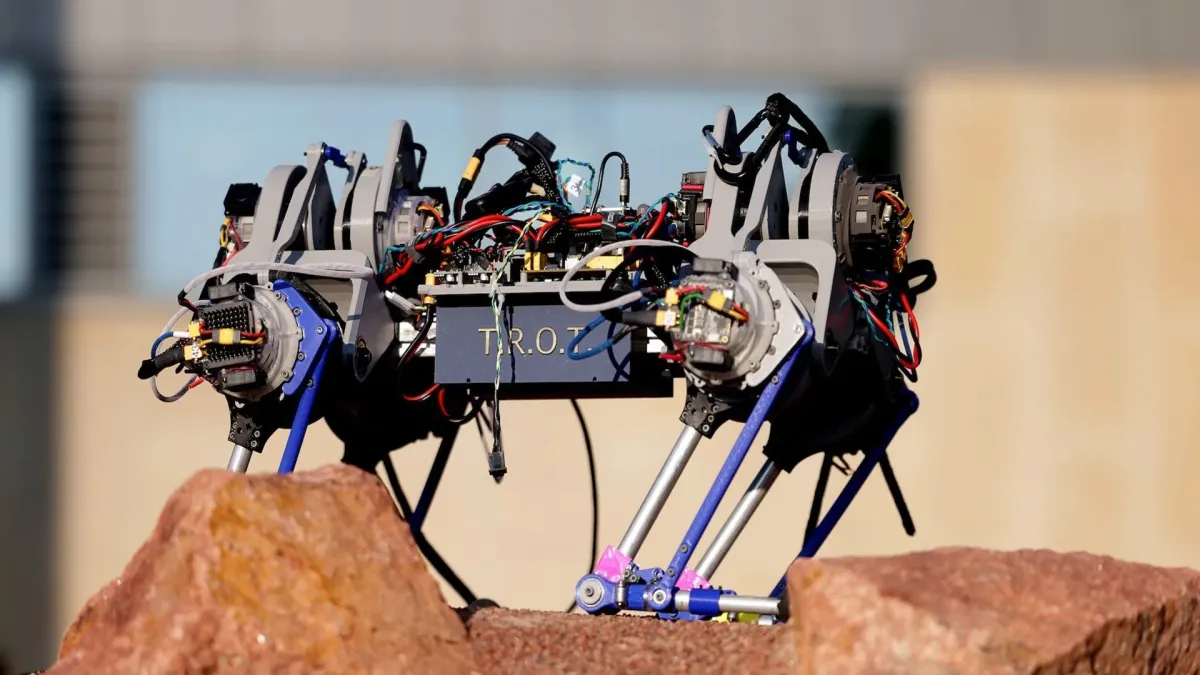
Talia Moore wanted to answer a question that bones alone can't: how did animals actually move when their limbs were shaped differently? As an evolutionary biologist turned roboticist at the University of Michigan, she knew paleontologists could study ancient skeletons, but reconstructing how a creature with different leg proportions ran or jumped required guesswork. So she built TROT—The Robot of Theseus—a quadruped that can shapeshift into extinct species' body plans in under 20 minutes.
The robot is deceptively simple. Its frame and most parts are 3D-printed. Motors come off the shelf. The total bill: under $4,000. But its real innovation is modularity. Swap out limb segments, adjust weight distribution, change joint ranges of motion—each modification lets researchers isolate a single variable and measure its effect on movement and energy cost. Sixty million years of evolutionary tinkering becomes an afternoon of experiments.
Why this matters for understanding evolution
For decades, researchers faced a frustrating gap. A 1974 study compared how much energy cheetahs and goats burned while running. Physics suggested the answer should be simple: animals with heavier limbs should tire faster, because swinging mass away from the hip costs more energy. Yet cheetahs and goats burned nearly identical calories. Why? Because dozens of other factors—muscle fiber composition, tendon stiffness, body proportions—all interact in ways living animals can't untangle.
We're a new kind of news feed.
Regular news is designed to drain you. We're a non-profit built to restore you. Every story we publish is scored for impact, progress, and hope.
Start Your News DetoxWith TROT, Moore's team isolated weight distribution alone. They could measure its true energetic cost without the noise of everything else evolution changed simultaneously. The robot's motors are "backdrivable," meaning they flex like muscles and tendons do, mimicking the spring-like behavior of real limbs without needing physical springs.
The design philosophy reflects Moore's background. Most parts fit together in only one way, which means researchers without formal robotics training can assemble and modify TROT without errors slowing them down. The team released the full plans publicly, turning a single lab's tool into a platform others can build on.
Commercial roboticists are already watching. Most quadruped robots today use identical front and hind leg designs—a safe, predictable choice. But if TROT's experiments show that specialized limb configurations genuinely improve performance, engineers might justify the manufacturing complexity of more sophisticated designs. The same principle that helps us understand how dinosaurs walked could shape the robots we build tomorrow.