Harvard engineers have figured out how to design robot joints that move like real knees—and the implications stretch far beyond walking machines.
The problem they solved is surprisingly human. Standard knee braces and exoskeletons use simple bearings positioned near the joint, but a real knee doesn't just hinge. It shifts, rolls, and slides in a complex motion that no basic bearing can replicate. This mismatch causes painful misalignment for people wearing assistive devices.
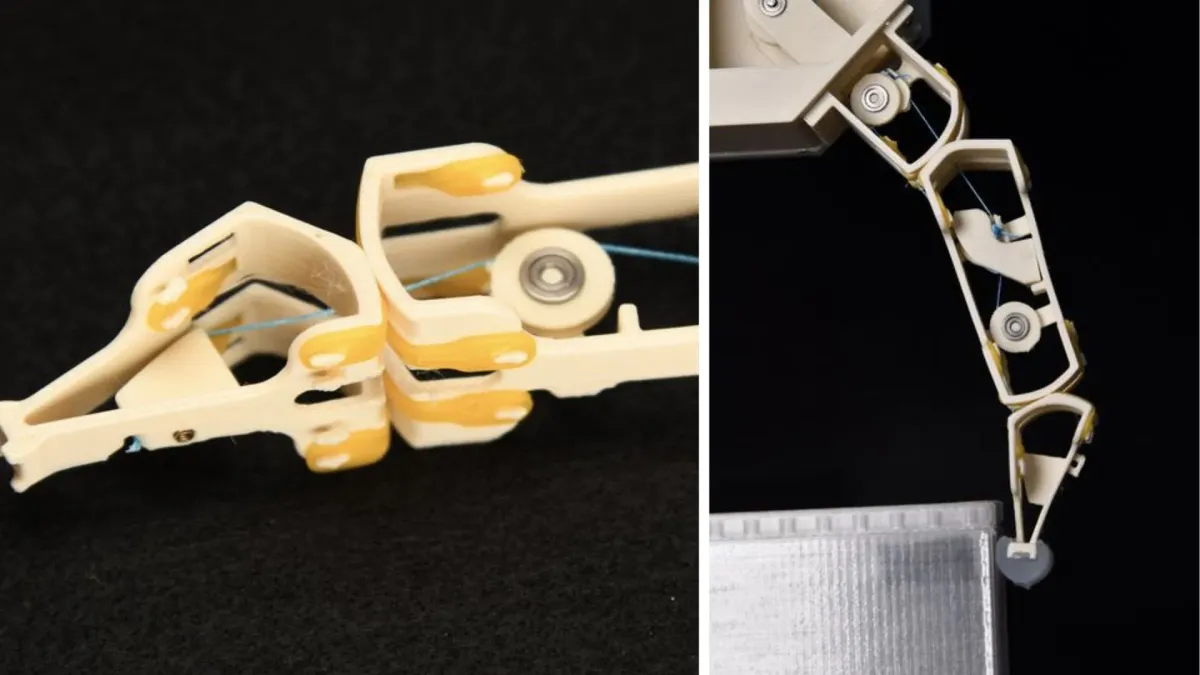
Researchers at Harvard's School of Engineering and Applied Sciences developed a mathematical framework to design what they call rolling contact joints—components that can be optimized on a computer to match the exact motion of a human knee. Instead of settling for a generic design, the team mapped the average path of how a real knee moves, then used their method to shape each part of the joint to follow that path as closely as possible.
We're a new kind of news feed.
Regular news is designed to drain you. We're a non-profit built to restore you. Every story we publish is scored for impact, progress, and hope.
Start Your News DetoxWhen they tested their optimized joint against a standard one, the results were stark: 99% reduction in misalignment. That's not a marginal improvement. That's the difference between a device that works and one that causes pain.
"If we can embed those decisions into the mechanics of the robot itself, then we can create robots that are more efficient," explains Colter Decker, the Ph.D. student who led the work. The insight is elegant: instead of relying on a control system to constantly correct a poorly designed joint, build the correction into the joint's shape. Use smaller actuators. Let the mechanics do the work.
The team demonstrated the method with two prototypes—the knee joint and a two-finger robotic gripper—but the real-world applications are already visible. Knee braces, exoskeletons, prosthetics, and joint replacements could all be tailored to an individual's exact motion patterns. Not one-size-fits-most. Fitted to you.
This is what happens when engineers stop treating mechanics and control as separate problems and start thinking about them as one system. The result is robots that move more gracefully and devices that fit the human body instead of forcing the body to adapt.